Path-planning with uncertainty: a simple model
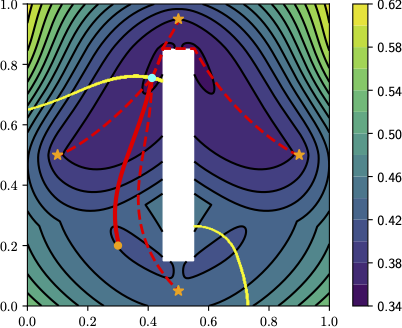
What should a planner do if a list of possible targets are known initially (instead of a single deterministic one), and the true one is revealed only after a certain time? What if the information can be obtained gradually? Can the planner make robust decisions?